Feasibility study for ballet
e-learning: Automatic composition system for ballet enchaînement with online
3D motion data archive
|
HTML version of: Umino,
B., Longstaff, J. S., & Asako, S. (2009). Feasibility study for ballet
e-learning: Automatic composition for ballet enchainement with online 3D
motion data archive. Research in
Dance Education, 10 (1), 17-32. - < http://www.informaworld.com/smpp/content~content=a908970731~db=all~jumptype=rss
> |
Bin Umino
Toyo University, Tokyo, Japan
http://www.soc.toyo.ac.jp/media/faculty/umino.html
Jeffrey Scott Longstaff
Trinity Laban, The City University, London England
http://www.laban-analyses.org/jeffrey/
Asako Soga
Ryukoku University, Kyoto, Japan
http://www.motionlab.jp/index_j.html
|
Abstract
|
This paper reports on a feasibility study for an automatic composition system for ballet e-learning. The purpose of this study is to determine whether the current version of the automatic composing system based on ballet three-dimension (3D) motion data is practically useful at present and concurrently how to develop this system further.
This study forms a part of our “Web3D Dance Project” (Umino, 2003). The goal of the research project is to develop systems for education, creation, and research for dance art accessible on the Internet. This is intended to be useful for dancers, choreographers, teachers, and dance theorists in providing an online accessible data archive of motion captured dance movements with the possibility for detailed study of anatomical movement organisation in 3D. In addition the system allows creative applications and studies of movement sequencing, phrasing or “enchaînement” using algorithms for automatic generation of movement sequences demonstrating logical and harmonious principles of ballet enchaînement as well as explorations with other contemporary movement phrases.
The purpose of this paper is to give an account of the development of the current system and to assess this initial stage of its implementation. This includes an e-learning model for ballet learning, creation of a 3D motion data archive of ballet movements, development of the algorithm for automatic composition of movement sequences, a description of the function of the system and how to use it, and assessments and evaluations of the current system.
E-learning
and e-resource for dance
Current educational trends in all subject areas increasingly make use of digital technologies or ‘e-learning’ in which software programs provide learners world-wide with interactive, self-directed learning experiences in a field of knowledge. E-learning is increasingly a widespread mode of education, having the obvious benefit of providing opportunities for students to study the area of knowledge from any location in the world through the Internet, and is evidenced by a large number of journals, institutes and web sites devoted to e-learning1.
Several benefits are thought to be associated with e-learning (Jonassen, 1992). The ‘constructivist learning environment’ allows choice and self-pacing in the speed of learning and frequency of sessions, as well as flexibility in the direction of learning which best fits students’ own personal needs and desires. Students have control over the order and depth in which each topic is explored and can choose when to take time for reflection, and when to move onto the next topic. This supports a situation where knowledge is actively gained based on the intrinsic motivations of each individual person. In addition to this self-guided environment, a counterpart should be provided which offers the complementary approach of a linear curriculum offering a defined series of lessons so students can keep track of all topics which should be covered (Beasley & Smyth, 2004).
Users of e-learning report that one of the most desired elements is interactive multimedia simulations providing educational purposes specific to the field of knowledge which can not be equally well achieved solely with printed text and images (Beasley & Smyth, 2004). This point is particularly applicable in the case of dance education where printed texts can never replicate the information available in actual movement practice. Thus, e-learning in dance can provide an exceptional link between these two, where textual knowledge can be combined with interactive multi-media representations of dance material.
Dance studies have developed and extended into a broad Internet medium. This is demonstrated by the breadth of studio-centres, performance companies, and online journals dedicated to exploring potentials for digital technology in performance and education2. Systems are also developed for translating from a notation system such as Labanotation into computer animation with software applications such as Life Forms, or other animation formats3. For example, Merce Cunningham famously used Life Forms software to assemble movements as part of his choreographic process allowing choreography via transcontinental computer links between choreographer and dancers (Wyman, 1993). In Japan Nakamura and Hachimura (2001) have developed dance education systems with multimedia such as 3DCG, dance notation and movie.
“Web3D Dance Composer”
The goal in the initial stage of this research was to develop an online automatic composing system which can generate dance movement sequences according to algorithms which define particular laws of sequencing. The automatic composing system functions within a 3D environment with animations assembled out of a library of 3D motion captured dance movements. This is intended as a study resource for teachers and students as well as researchers in physical function. In order to present a viable learning environment it was decided that the system for dance e-learning should include the following features:
- Dynamic simulations of dance
- Organic, realistic representations of human motion
- Viewable in full 3D perspectives
- Available access on the Internet
- User editable and interactive (choices)
- Include motion data archive of dance steps
- Include possibilities for composition or choreography
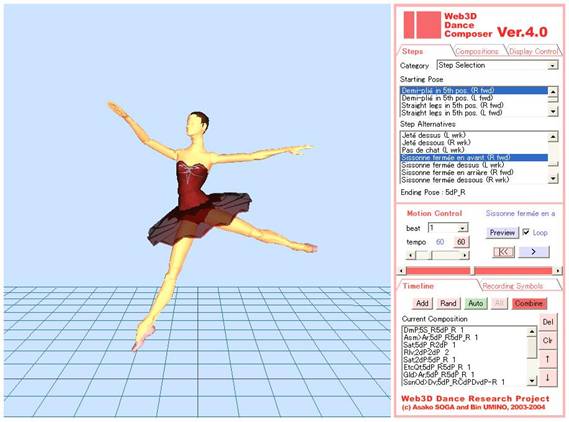
The last criterion means that the system displays not only steps and movements, but demonstrates how to combine these in sequences. The system “Web3D Dance Composer” was developed according to these seven criteria, focusing on e-learning for classical ballet (Soga, Umino, & Yasuda, 2002, 2003, Soga, Umino, Yasuda, Yokoi, 2004, Soga, Umino, & Longstaff, 2006). Fig 1 shows the user interface of the whole system which is outlined later.
|
Figure 1. User interface of Web3D Dance Composer |
Limitation
to ballet
For the first stage of this research, the dance movements studied were limited to classical ballet which is popular world-wide and often regarded as a training method applicable to other dance forms. The principal reason of this limitation to ballet is the established tradition of codified terminology and systematic pedagogy of poses and steps which allows for the systematization, segmentation, enumeration, classification, and cataloguing of isolated elements of data which is necessary for the digitization and creation of data archive. This offers a system of underlying rules for intermediary transitions or links between steps according to which the isolated elements can be handled as building blocks, reused for composition by the computer into movement sequences or ‘enchaînement’. Further, because of the sheer number of ballet movements the first stage of this research was limited to female, elementary level, ‘petit allegro’.
To make the dance motion archive, dance movements must be segmented into short pieces of motion called ‘manipulated units’, these independent motion data can then be easily retrieved and recomposed into any desired sequence. Accordingly, a catalogue of basic ballet steps was enumerated for female petit allegro. Although there are many ballet dictionaries and ballet syllabi worldwide, there is no universal comprehensive list of basic ballet steps for female petit allegro. Therefore the catalogue of ballet poses and ballet steps was organised in collaboration with expert ballet teachers in Tokyo and reviews of major ballet codified techniques. These generally follow terminology of the Royal Academy of Dance (Ryman, 2000), but there are exceptions.
Enumeration
and classification of ballet poses and steps
To develop the system, ballet poses were distinguished at the top hierarchical level either as Family 1. weight on one leg; or Family 2. weight on both legs. These were taken as the starting and ending positions for each step. Within these families, several sub-families were also distinguished according to 1st, 2nd, 4th, and 5th positions of the feet and the height and extension and direction of the working leg. This resulted in a total of 84 basic poses for elementary level female petit allegro ballet (45 poses if laterally symmetric poses are considered to be the same).
Each basic pose was assigned with a plain text code for digital processing. For example: 5dP_R denotes “5th position en demi-plié with the right foot in front”; DvTrdP-L denotes “left leg dégagé devant à terre en fondu”; AtDrS-R denotes “attitude derrière, right leg working and a straight supporting leg.”
Next, ballet steps were classified at the highest hierarchical level into 4 families, each with several sub-families, and each sub-family with symmetrical and directional transformations (performing a step right, then left, or forward, then back etc.):
l Family A, allegro steps: Comprises quick movements, including 24 sub-families such as ‘sauté’, ‘changement’, ‘assemblé’, ‘glissade’, ‘jeté’, and ‘sissonne fermée’.
l Family B, rotation steps: Comprises turns around the dancer’s vertical axis, including 4 sub-families; ‘pirouette en dehors’, ‘pirouette en dedans’, ‘chaînés’, and ‘piqué en dedans’.
l
Family C, transition steps: Refers
to movements which usually link between steps in Families A or B, or part of a
necessary preparation. This
includes 18 sub-families such as ‘chassé’, ‘assemblé soutenu en
tournant’, ‘tombé pas de buorrée’, ‘pas de buorrée’, and ‘pas
de basque’.
l Family D, fragmentary steps: Refers to short motions to create seamless series amongst the other families. These are not real ‘steps’ but movements linking other steps and include 6 sub-families such as ‘demi-plié’ (bending), ‘demi-plié’ (stretching), and ‘changing the supporting leg’.
With all families, sub-families and transformations, a total of 543 basic steps were enumerated in the step catalogue (female, elementary, petit allegro; 206 allegro steps, 74 rotation steps, 145 transition steps, and 118 fragmentary steps) (Umino, 2003). Each basic step was assigned with a plain text code for digital processing and these were combined with the plain text codes for the basic poses (Soga, Umino, Yasuda, & Yokoi, 2004). For example: Cng;5dP_R:5dP_L denotes “changement from 5th position en demi-plié with right foot forward to the same position with left foot forward”; PrtDhr^1>Dv;4XdP_R:4XdP_R denotes “pirouette en dehors single rotation devant from 4th position crossed en demi-plié with right foot forward to the same position.”
It is understood that teachers and schools of ballet do not all organise ballet steps and poses according to these same hierarchy of categories. This categorisation system was developed purely for reasons of data processing and is not necessarily intended to be part of the actual content of the e-learning. The classification of ballet steps and poses as outlined above was developed only to systematically organise a multitude of movements into a strict system useable for data processing.
Motion
capturing ballet movement
Ballet poses and steps were acquired for digitalization using 3D motion capture systems (Soga, Umino, & Yasuda, 2002, 2003). The ballet poses and steps were captured from demonstrations by professional female ballet dancers in Japan. Both magnetic and optical motion capture systems were used. Motion capture systems record real life movements in 3-dimensional space, and represent these as XYZ coordinates. These 3-dimensional coordinates are then used to animate a computer character or other model, so it exactly follows the original movement. The resulting animated characters are extremely lifelike. The use of motion captured movements, as opposed to digitally created animations from software such as Life Forms ensures that the movements produced have a realistic, organic character displaying the performers’ actual ballet technique.
Next, the raw motion capture data was transformed into manipulated data through several stages. Virtual Reality Modelling Language(VRML) has currently been adopted as the standard data format. This was translated to fit an original hierarchical skeletal system of a dancer’s body which was created for this research and complies basically with VRML H-anim standard4. The skeletal system has 20 segments and 16 joints of a body.
Finally, movements were segmented into elements so that each bit starts and ends at one of the 84 basic ballet poses as mentioned before. The motion data archive storing these segmented movements was made available for public access on the Internet. This archive currently includes 215 steps (from the total number of 543 enumerated in the complete step catalogue).
Online
user interface and functions
The system “Web3D Dance Composer” was programmed with Java language. It controls the VRML world with ‘External Authoring Interface’ (EAI), and is accessible by any user through the Internet with minimum system requirements.5 The user interface provides several panels and controls which allow a variety of possibilities for exploring and manipulating dance movements from the archive (see Fig. 2).
|
Figure 2. Panels
and buttons for Web3D Dance Composer |
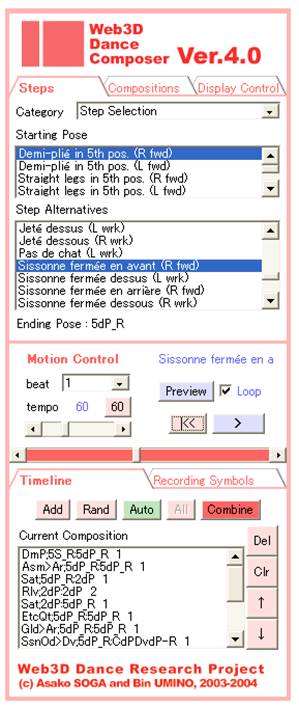
“Cortona VRML” viewer is a ready-made plug-in software for VRML world which has the function of several controls for manipulating the 3D viewer. These include buttons for zooming-in and zooming-out, and changing the viewpoint by panning or rotating. This provides opportunities to view the small details of the dance technique from any viewpoint in three dimensions, or to see it from a distance in the context of the overall space. Because of the variety of different limb orientations in ballet movements this ability to adjust the viewing angle is critical to allow features of movements to be clearly visible.
The “display control panel” allows a selection of various options including the dancer models (e.g. skeleton, figure in a leotard, figure with a tutu), type of stage background (e.g. grid floor, virtual studio, virtual stage), selection of music, number of dancers, formation of dancers (line or circle), distance between dancers, and angle of formation relative to the stage.
The “step catalogue panel” allows browsing and selecting motions from the step archive in pull-down menus, once selected they can be previewed in the VRML viewer and inserted into an extended sequence. These are saved as plain text code for data processing. The “motion control panel” offers buttons for play, pause, and rewind, as well as a menu for changing the beat of each step, and a scroll bar for adjusting tempo. Additionally buttons for ‘Preview’ and ‘Loop’ allow a step to be previewed or observed repeatedly.
In the “timeline panel” the current dance sequence being composed is displayed with abbreviated titles for each step and also the position of the feet (e.g. 5dp_R denotes 5th position en demi-plié, right foot front). To create sequences, new steps can be added by selecting a step from the step catalogue panel, then clicking the ‘Add’ button in the timeline panel. Alternatively clicking on the ‘Rand’ (random) button causes one additional step to be added which is randomly selected from amongst steps with the appropriate starting position. Additional buttons allow steps to be deleted or moved to a new order in the sequence. Finally, to view the entire sequence the ‘Combine’ button is clicked sending all the steps and poses in the current sequence to the VRML world.
The “recording symbols panel” is also
provided which displays the plain text code for all poses and steps currently
in the VRML world, from where they can be saved for archiving and reusing.
Movement sequencing or enchaînement
The art and
character of ballet is not confined to lists of poses and steps, therefore rules
and conventions were investigated which regulate how individual steps and poses
are combined into sequences. The verb ‘enchaîner,’ ‘to link’ in French,
is used in ballet terminology as ‘enchaînement’ for a sequence of steps
linked together. This may refer to a
short phrase of choreography in a performance work or to a brief series of
basic steps in daily classroom lessons. However, enchaînement in classical
ballet is more than just a series of movements; it is a basic compositional
structure assembled according to underlying principals of organic body movement
and artistic conventions of balletic harmony and design. For example, one of the principals of enchaînement is the balance of space occupancy which
requires polyhedronic movement and avoidance of heavily unsymmetrical
action. Another principal is fluency of
time which requires proportionate energy inflection.
The intention of this research was to decipher underlying ‘rules’ or principles for describing enchaînement compositional structure and to transform these into an algorithm for the automatic composition system. The research focused on enchaînement in daily classroom lessons. During initial research into characteristics of classical ballet enchaînement a considerable number of sequences were gathered from ballet classes choreographed by two expert ballet teachers with over 20 years experience. Subsequently, a series of interviews with the expert ballet teachers (more than 10 meetings over 6 months) was carried out, who discussed their insights and perceptions on the characteristics essential for a logical and harmonious enchaînement. These essential characteristics emerged from the observations and discussions and also take into account the efficacy of learning, degree of difficulty, mobility between steps, and memorability of sequences. Moreover they reflect the aesthetic of ballet art.
The interviews revealed that teachers design the constitution of enchaînement with the intention of aiding the efficacy of learning. In their classes the teachers endeavour to make the purpose of each enchaînement clear and appropriate to students’ level of proficiency and ability. Based on the interviews 5 factors were established which act as principles governing composition of enchaînement for classroom.
l Factor 1. Appropriate step selection: Certain steps are selected according to the dancers’ skill level. This factor was surmised to be the most essential for elementary level ballet learning.
l Factor 2. Appropriate transitions between steps: Steps are arranged in a consecutive order and follow a logical progression which is determined firstly by physical constraints so that movements can be efficiently performed, but also determined by ballet aesthetic considerations.
l Factor 3. Appropriate repetition: Some steps, or types of steps, may be repeated several times in the same enchaînement, while others may appear only once. This allowance for repetitions of particular types of steps is related to appropriate transitions between steps, and also to the physical exertions required for different types of movements at elementary level.
l Factor 4. Appropriate physical exertion required: Over the entire course of an enchaînement the overall energy exerted should not exceed a critical threshold. This is related to the length of the enchaînement and also the physical exertion required by the individual steps which are selected.
l Factor 5. Appropriate memorability: Enchaînements are often composed for ease of memory in accordance with the dancer’s skill level. This can be accomplished by using repetitions of steps, symmetrical alternations or typical links between steps.
Algorithm for automatic composition of enchaînement
These five factors were formulated into an algorithm which describes the logical and harmonic structure of enchaînement as advised by the interviews with the expert ballet teachers. In designing an algorithm, a choice must be made between a strategy for either “maximum precision” where the number and variety of potential movement sequences produced by the algorithm are narrowed in the intention to be as accurate as possible, thus reducing errors; or “maximum recall” where the range of potential sequences produced is widened with the intention to produce the greatest number of possibilities, though also the greatest number of errors. There is an obvious trade-off between these strategies. Because the intellectual process carried out by ballet teachers in the creation of enchaînements is very sophisticated and complex, a certain degree of inaccuracy was anticipated in this first attempt at an algorithm, therefore the approach taken here was to maximise precision in order to minimise the generation of improperly or poorly choreographed enchaînements.
The algorithm for automatic composition was constructed under this strategy. Since the upper-body movement was basically an accompaniment to the particular step in ballet lessons, the algorithm took account of only the lower-body movements. The first constraint for the algorithm is step continuity. This constraint regarding transitions between steps (Factor 2) orders steps according to the anatomical requirement whereby the ending pose of the previous step becomes the beginning pose of the next step. At the start point of designing the algorithm, the 5th position of the feet was chosen as the starting position for all the enchaînements, as this practice is the most commonly used in petit allegro lessons. At the end of any enchaînement the algorithm selects 1 out of the 3 possible poses which were identified by the ballet teachers as appropriate final positions.
In real ballet lessons the duration of enchaînements vary from 6 beats (2 bars in three-four) to 64 beats (16 bars in four-four or 32 bars in six-eight). However in petit allegro enchaînements the standard duration would be four or eight musical bars (12, 16, 24 or 32 beats depending on the time signature). In order to address the complexity required of the algorithm the duration of enchaînements was restricted to just 16 beats (4 bars in four-four) in this first trial of the system.
The algorithm uses the family classification -- Family A to D -- to give
constraints about transitions between steps (Factor 2) and repetition of steps (Factor
3). The basic constraints regulating
transitions within and between the 4 families are as follows (see Fig. 3).
|
Figure 3.
Flow chart for sequences of steps across step-families |
Firstly, several constraints apply to immediate successions of steps in Family A (allegro family). After an allegro step, there is an option to repeat that same step once (2 performances of the same step). This same pattern of two allegro steps can also be repeated, though they must be from a different sub-family (i.e. symmetrical variation, right-left, fore-back). Thus, there might be 1, 2 or 3, but no more than 4 allegro family steps in succession. Following this, there must a step from a different family.
Secondly, in regard to steps in
Family B (rotation family), at elementary level the algorithm allows only 1
rotation step in immediate succession (i.e. no double turns). Further, this
rotation step is always preceded by a preparation action. There is an option to
follow the rotation step with a short recovery action; otherwise the next step
must be from a different family. An additional overall rule in the algorithm
for rotation steps also places a constraint that only one set of rotation steps
can occur in a single enchaînement.
Thirdly, since Family C (transition steps) serves as connecting or linking steps, the algorithm allows only 1 step of Family C in succession. Immediately preceding and following a transition step there must be a step from a different family. And lastly, Family D (fragmentary steps) serves as small adjustments required to connect between steps in other families. The algorithm allows a maximum of 2 steps of Family D in succession, with an additional constraint that this entire sequence always has a duration of 1 count. Immediately preceding and following this, must be a step from a different family.
The algorithm considers the order of steps from different families. Enchaînement must begin with either the allegro family or rotation family. After this, steps from any family can follow in sequence (subject to other constraints in the algorithm).
Furthermore, three parameters are considered as the constraints to complete the algorithm; level of difficulty, musical phrasing, and physical exertion.
The parameter of level of difficulty includes two factors; difficulty of particular steps, and also difficulty of transition if two particular steps are performed in immediate succession. Additional constraints were included in both cases so that the algorithm only permits difficulty of steps or transitions as appropriate to the elementary level.
Musical phrasing is another parameter for the algorithm. In accordance with traditional ballet practice the timing of steps is constrained relative to the music such that a step is never allowed to carry over from one musical bar to the next. If a step has too many beats for the current musical bar it is either shortened or not chosen. This has the result that a new step always begins on count 1 of each bar.
After initial trials, it was found
that some enchaînements generated by the system were physically
impossible. This was addressed by the parameter regulating the degree of
physical exertion (Factor 4). With advice from the expert ballet teachers
default physical exertion ‘scores’ were assigned to each step (1 = lowest
exertion, 8 = highest exertion). This offers a way to estimate the total
physical exertion required for a single enchaînement. After trial runs
the algorithm was set to allow 16-beat enchaînements with total
exertions scores between 30 and 50.
Eventually, Factor 1 (appropriate
step selection) and Factor 5 (appropriate memorability) were both satisfied by
the combination of the constraints previously noted. This algorithm was then
embedded in the system “Web3D Dance Composer” to be used in the automatic
composition of enchaînements. The
algorithm is used for automatic generation of new enchaînements which
should demonstrate the same composition qualities as the enchaînements
composed by expert ballet teachers from which the algorithm is derived. New enchaînements can be generated by
the automatic composing system by clicking the ‘Auto’ button in the timeline
panel. This automatic composition, following
the underlying rules for creating enchaînements, allows for an
indefinite number and variety of enchaînements to be composed, drawing
on all the poses and steps in the archive, thus creating an inexhaustive
generative resource. The ‘rules’ or
constraints defined in the algorithm for composing enchaînement can be described in the language of
dance and has been represented in graphic signs used in Laban motif for
education in dance notation and study and motion analysis (Umino, Longstaff,
& Soga, 2005).
Experiment evaluating the system
An experiment was carried out in order to evaluate the efficacy of the enchaînement algorithm for ballet education. The experiment was designed to assess whether automatically choreographed enchaînements would be appropriate for ballet classes at elementary level. This was assessed according to two aspects: “practicality”, whether usable enchaînement in class lessons, and “difficulty”, whether appropriate to elementary skill level.
Method
Five expert ballet teachers working in London were selected as subjects to assess the algorithm for automatic for automatic composition of enchaînements. Their experience as ballet educators varied from 10 to 24 years. Their nationalities were English, Dutch, Greek, and Japanese.
A group of 20 enchaînements composed automatically by the algorithm were analysed by each subject. The enchaînements represented the range of movements as steps from 20 allegro sub-families and all 4 rotation sub-families from the data archive appeared in at least one enchaînement. The physical exertion score for each enchaînement varied from 31 to 49 (average 43.2).
Each subject individually analysed and rated the 20 enchaînements in the 3D viewer of “Web3D Dance Composer.” Subjects could watch the enchaînements from any viewpoint and as many times as they liked. Subjects were instructed to analyse and rate each enchaînement according to practicality and difficulty; only on the lower-body movements as these are currently the only aspects devised by the algorithm.
Practicality refers to the appropriate skill level of the enchaînements and the usefulness or effectiveness of it in terms of educational benefits. This is related to all the factors of the algorithm (Factors 1 to 5) mentioned above. Practicality was rated on a scale from 1 to 5: 1) inappropriate for a ballet lesson; 2) upper limit for an advanced lesson; 3) appropriate for a normal advanced lesson; 4) upper limit for an elementary level lesson; 5) appropriate for a normal elementary level lesson.
Difficulty refers to the technical requirements of the enchaînements. This is also related to all the factors of the algorithm, but it is seen to be different from practicality, since in preliminary trials some enchaînements were rated as appropriate in technical skill level (‘difficulty’), yet were also rated as not practical. Hence these two factors are not automatically correlated. Difficulty was rated on a scale from 1 to 5: 1) cannot be danced; 2) a professional dancer could accomplish the sequence; 3) an advanced student could accomplish the sequence; 4) a strong elementary level student could accomplish the sequence; 5) an elementary level student could accomplish the sequence.
Since it was essential that standards for judging technical level had to be shared among the subjects, the syllabi of Royal Academy of Dance were taken as points of reference. For example, in the experiments “an elementary level student” refers to an adult student who has at least accomplished Elementary level on the RAD Major Work Syllabus (Royal Academy of Dance, 2002a, 2002b, 2002c, 2003).
Each subject was interviewed after undertaking the evaluation and rating process. Any low ratings were discussed, analysed and clarified to establish what the problem areas were to further develop the algorithm.
Statistical Results
Each of the 5 subjects rated each of the 20 enchaînements yielding 100
ratings for each of 2 aspects (practicality, difficulty). Percentage results
are presented in Tables 1 and 2.
Quantitative analysis was carried out from these data.
|
Table 1. Ratings of ‘practicality’ of 20 enchaînements by 5 expert ballet teachers
% of total number of ratings |
|
Table 2. Ratings of ‘difficulty’ of 20 enchaînements by 5 expert ballet teachers
% of total number of ratings |
In terms of enchaînement ‘practicality,’ only 8% of the ratings considered the enchaînements produced by the algorithm to be inappropriate for a ballet lesson. Five enchaînements were evaluated as “inappropriate” by a single subject, and another one was evaluated as so by three subjects. 65% of the ratings considered that the enchaînements were appropriate for an elementary level lesson either at the limit of upper level or at normal level.
In terms of the enchaînement ‘difficulty,’ no enchaînement was evaluated as “cannot be danced.” This finding satisfies one aim of the initial stage of this research to generate automatic compositions which are useable to the dancer. Further, 78% of the ratings considered that the enchaînements could be accomplished by an elementary level student.
A correlation test between practicality and difficulty ratings was undertaken. Since the ratings with a 1 to 5 score are ‘ordinal scale’ in statistical terms, ‘Spearman’s ρ (rho)’ (rank correlation coefficient) was adopted as a nonparametric measure. The correlation was tested where the degree of freedom was 99 (100 ratings - 1). As a result the practicality and difficulty were found to be significantly correlated (ρ=0.75; p<0.01). This indicates that the enchaînements rated as being accomplished by an elementary level student in terms of ‘difficulty’ were appropriate for elementary level lessons and therefore subsequently more difficult enchaînements were rated as being more appropriate for advanced lessons.
It was also
necessary to ascertain whether the different expert ballet teachers agreed with
each other on their ratings. High correlation levels are possible with a far
from perfect agreement. Therefore, inter-observer agreement was tested with
“Kendall's agreement test”, a nonparametric method usually used for this
purpose. ‘Kendall’s coefficiency of agreement’ (w) was calculated. The degree of freedom was 19 for the both
agreements (20 enchaînements - 1). In the matter of practicality, the hypothesis
of agreement was accepted (w=0.42; p<0.01). In the matter of difficulty, the
hypothesis was also accepted (w=0.47; p<0.01).
This result means that the teachers agreed significantly
regarding the practicality and difficulty, so that the strong general
correlation between practicality and difficulty are reliably supported.
Interviews
and Discussions
The expert dance teachers were interviewed to provide qualitative analysis after they had finished the test. In these interviews three main reasons emerged as to why some enchaînements were rated as exceeding elementary level.
The first reason was the enchaînement included a step which was considered to be inappropriate for this level. Since the motion data archive was designed to include only elementary level steps, this may be thought of as a defect in the motion data archive, but another problem recognised in discussions was that the subjects did not agree about which steps are considered to be elementary level. Some subjects considered that all the enchaînements contained only steps appropriate for elementary, while another subject considered that several enchaînements included steps which were not appropriate for elementary level. For example one teacher argued that ‘pas de chat’ is an elementary step while another teacher considered it to be at intermediate level. The teachers agreed with each other on their ratings statistically, but they did not necessarily agree on what steps were appropriate for elementary level. To address this issue, it would be better if the system allowed flexibility whereby the users to select either complete automatic generation of enchaînements or particular steps which they wish to be included in the enchaînement according to their needs and differing pedagogical approaches.
The second reason why some enchaînements were rated as exceeding elementary level was that the enchaînement was composed with only appropriate steps, but included transitions and a series of steps which were rated as too difficult for elementary level. The third reason was that the enchaînement was too difficult for elementary students to memorize. These problems should be taken as indications of certain inadequacies in the current algorithm. Previous research on an earlier version of the algorithm had already demonstrated that memorability is sufficiently correlated to both practicality and difficulty (Soga, Umino, Yasuda, & Yokoi, 2004). This indicates that memorability of enchaînements can be improved by also improving the practicality and difficulty.
Since the system adopted the strategy of “maximum precision” as mentioned before, the algorithm can be improved by adding new rules according to advice from expert ballet teachers in order to make the automatically composed enchaînements more practical and less difficult.
It was also discussed in the interviews how the system needs developments as an e-learning tool, namely 1) in terms of 3D computer graphics transitions between steps are not as smooth as desirable, 2) upper-body movements should be considered, 3) although musicality is an essential feature of lessons, the current quality of sound the system produces is not appropriate for lessons, and 4) the user-interface could be made more friendly in line with needs of its target users.
All 5 teachers said that the system would be useful as a teaching aid subsequent to adjustments and developments of the software. However they also emphasised that the system was a tool to aid students learning ballet but could not replace practical experience with a teacher. It must be stressed that every teacher recognizes that face-to-face communication is absolutely necessary for dance education.
The creativity potential of the
system was also highlighted in discussions. The enchaînements were not
rated for creativity in this study, however three of the teachers described how
enchaînements created by the algorithm brought them new ideas for
lessons such as unfamiliar step sequences which they had never taught before
but would find useful to use in a ballet class. They suggested the possibility
that the system inspires novel ideas for ballet teachers since a wide range of
steps and poses in the data archive is combined in an indefinite number and
variety of enchaînements, yet also
follow the principles of sequencing in the algorithm, thus creating an
inexhaustive generative resource for composition.
Conclusions
The purpose of this initial stage of research was to determine what type of automatic composing system would be practically useful as an e-learning tool for dance practitioners. Initial feedback is encouraging and highlights that further development could be beneficial for the dance world.
The algorithm in “Web3D Dance Composer” was designed to create enchaînements appropriate to classical ballet elementary level. Success was achieved in that none of the enchaînements generated by the algorithm was rated as “cannot be danced”. Further, 92% of all enchaînements generated were rated as appropriate for use in ballet lessons, however further differentiation needs to be made as some of these were rated as only suitable for advanced level. It is not easy to define which steps are appropriate for elementary because in the interviews it became evident that subjects had different perceptions of which steps should be regarded as too advanced for elementary lessons.
These results indicate that the current algorithm has enough practicality to be usable across the entire range of ballet education as ballet teachers can browse innumerable possible enchaînements generated from “Web3D Dance Composer” and choose sequences to match their requirements. Furthermore feedback from teachers employing the current software will generate further developments and refinement of the software.
The system can be useful for ballet teachers enabling the composition of many short sequences for use in daily lessons. Teachers can compose and simulate the enchaînements they prepare for a lesson in 3D environment. These might be composed completely automatically or semi-automatically by selecting particular steps to be included somewhere in the sequence. Students can then view the sequences through the Internet, both before and after actual classroom sessions. Further, teachers can save their enchaînements (as text codes) for later use and also for sharing with other teachers world wide through the Internet. The algorithm used by “Web3D Dance Composer” for automatic composition allows for an indefinite number and variety of enchaînements to be composed, drawing on all the poses and steps in the motion data archive, thus creating an inexhaustive generative resource.
Notes
1. An abundance of journals and institutes focus on e-learning, for example (retrieved Sept. 2007): “Electronic Journal of eLearning” (http://www.ejel.org ), “elearning post” (http://www.elearningpost.com ), “Internet eLearning Institute” University of Tennessee (http://anywhere.tennessee.edu/iei/ ), “the elearning guild” (http://www.elearningguild.com ), “elearning alliance” Scotland (http://www.elearningalliance.org ), “e-learning centre” (http://www.e-learningcentre.co.uk ), and “elearning europa” e-learning programme of the European commission (http://www.elearningeuropa.info ).
2. A variety of studio-centers, performance companies, and online journals dedicated to exploring potentials for digital technology in performance and education (retreived Sept. 2007): Digital dancing, London (http://www.braunarts.com/digidancing );
Centre for Art and Media Technology, Karlsruhe Germany (http://www.zkm.de ); Digital Theatre Experimentarium, Denmark (http://www.daimi.au.dk/~sdela/dte ); Riverbed, Paul Kaiser, Shelly Eshkar (http://www.riverbed.com ); Intelligent stage, Robb Lovell, John D. Mitchell (http://www.intelligentstage.com ); “Body - Space - Technology” journal (http://people.brunel.ac.uk/bst/ ); Interactive media technology center ; dance technology project (http://www.imtc.gatech.edu/projects/culture/dance.html ); Laboratorio di Informatica Musicale, Genova; technologies for music, dance and theatre ( http://www.infomus.dist.unige.it ); Space Illusion dance player with abundance of dances for download (http://www.spaceillusion.com ); Warabi-za Digital Art Factory (http://www.warabi.or.jp/buyo-fu ).
3. Several systems have been developed for translation between Labanotaion and computer animiations (retrieved Sept. 2007): LifeForms from Credo Interactive (http://www.credo-interactive.com ); Laban-Life forms interface project
(Calvert, Wilke, Ryman & Fox, 2005; Fox, Ryman, & Calvert, 2001); Led and lintel windows mini-editor and interpreter for Labanotation (http://www-staff.it.uts.edu.au/~don/pubs/led.html )
4. VRML Humanoid Animation Working Group: The VRML Humanoid Specification, http://www.h-anim.org/
5. Minimum system requirements are Windows PC (Windows 95/98/Me/NT/2000/XP), Microsoft Internet Explorer, and a free plug-in VRML viewer, such as Cortona VRML Client ( http://www.parallelgraphics.com/products/cortona ).
References
Beasley, N. & Smyth, K. (2004) Expected and actual student use of an online learning environment: A critical analysis, Electronic Journal on e-Learning, 2 (1), 43-50.
Fox, I., Ryman, R., & Calvert, T. (2001) Documenting dance for the 21st century: A translation interface between LabanWriter and Life Forms, in: Proceedings of the twenty-second Biennial Conference of the International Council of Kinetography Laban, 26 July – 2 August, (Ohio State University, Columbus, Ohio USA: ICKL), 193-205.
Jonassen, D. H. (1992) Cognitive flexibility theory and its implications for designing CBI, in: Dijkstra, S., et al. (Eds.) Instruction models in computer-based learning environments (Berlin, Springer-Verlag), 385-403.
Nakamura, M. & Hachimura, K. (2001) Development of multimedia teaching material for Labanotation, in: Proceedings of the twenty-second Biennial Conference of the International Council of Kinetography Laban, 26 July – 2 August (Ohio State University, Columbus, Ohio USA: ICKL) 150-160.
Ryman, R. (2000) Dictionary of classical ballet terminology, 2nd Rev Ed. (London, Royal Academy of Dance).
Royal Academy of Dance (2002a) Graded examinations in dance & presentation classes. Grade 1-3, Male & female syllabus (London, Royal Academy of Dance Enterprises Ltd).
Royal Academy of Dance (2002b) Graded examinations in dance & presentation classes. Grade 4-5, Male & female syllabus (London, Royal Academy of Dance Enterprises Ltd).
Royal Academy of Dance (2002c) Graded examinations in dance. Grade 6, Female syllabus (London, Royal Academy of Dance Enterprises Ltd).
Royal Academy of Dance (2003) Graded examinations in dance. Grade 7, Female syllabus (London, Royal Academy of Dance Enterprises Ltd).
Soga, A., Umino, B., & Longstaff, J. S. (2006) Automatic composition of ballet sequences using a 3D motion archive, Review of the National Center for Digitization, (8), 67-73.
Soga, A., Umino, B., & Yasuda, T. (2002) A web-based interactive choreography simulation system for ballet, Journal of the Society for Art and Science, 1(1), 30-38.
Soga, A., Umino, B., & Yasuda, T. (2003) A web-based motion archive and 3DCG simulation system to support classical ballet choreography, Journal of the Information Processing Society of Japan, 44(2), 227-234.
Soga, A., Umino B., & Yasuda, T., & Yokoi, S. (2004) Systematic coding method and creation-supporting system for ballet choreography using 3DCG, Journal of the Society for Art and Science, 3 (1), 96-107.
Umino, B. (2003) Theory and practice for information organization directed to human motion data: development of 3D-motion database for classical ballet basic steps, Bulletin of Faculty of Sociology, Toyo University, 41(1), 131-167.
Umino, B., Longstaff, J. S., & Soga, A. (2005). Laban motif of algorithms governing automatic generation of dance sequences in Web3D Dance Composer, in: Proceedings of the twenty-fourth biennial conference of the International Council of Kinetography Laban (ICKL), 29 July - 4 August (LABAN centre, London: ICKL).
Wilke, L., Calvert, T., Ryman, R., & Fox, I. (2005) From dance notation to human animation: The LabanDancer project, Computer Animation and Virtual Worlds, 16 (3-4), 201-211.
Wyman, M. (1993). This computer loves to dance. The New York Times, Sec: 2 Arts and Leisure, Sunday June 27.