A kinespheric path refers to the form created by the lines of motion as the body moves through space.
IVB.31 Generalised Inwards / Outwards Movement.
A basic distinction is often made between paths which generally condense inwards towards the body versus paths which expand outwards away from the body. Laban (1980, pp. 83-86) referred to these “two main action forms” as “gathering” and “scattering”. Gathering movement “can be seen in bringing something toward the centre of the body”, is a movement of “possession” by which “an object is gripped”, and is preserved in ballet as “attitudes” which surround the space. Scattering movement “can be observed in pushing something away from the centre of the body”, is a movement of “repulsion” by which an object is propelled “outwards into space”, and is preserved in ballet as “arabesques” which “radiate from the centre of the body” outwards. In another work Laban (1966, pp. 49-50) limits gathering and scattering to being the “most apparent activities for the arms” as opposed to “taking steps” for the legs. Furthermore, “Gathering or taking is usually associated with a turning of the palms towards the body” and gives “a feeling of contraction” whereas “scattering, or rejecting, [usually occurs with] an outward turning of the palms” and “gives a feeling of opening out and of expansion”.
Laban (1966, p. 53) attempts to outline the relationship between gathering/scattering and the kinespheric pathway. He first asserts that the pathway (ie. “gesture-line in space”, or “trace-form”) has “an independent life” from the “particular way of using a limb” (ie. gathering or scattering). That is, any pathway can be performed with either gathering or scattering movement. He then adds that “This independence, however, is not a reality”. This statement is not explained and the reader is referred to another chapter which contains a discussion of the kinesthetic perception of paths from within, versus seeing paths from an outside viewpoint, but contains no mention of gathering/scattering (pp. 83-91). It may be that Laban conceives of gathering/scattering as resulting from a “muscular trace-form” which is perceived from the interior while the “gesture-line in space” is perceived from the exterior (p. 53) and that these two are dependent since certain paths require certain interior skeletal-muscular articulations which will encourage either gathering or scattering.
Laban (1966) also identifies the tying and untying of “knots” which are similar to gathering/scattering. “In moving inwards towards the centre of our body we follow trace-forms which resemble knots” and “in moving outwards . . . we usually employ such untying or untwisting movements” (p. 92):
All movement is an eternal change between binding and loosening, between the creation of knots with the concentrating and uniting power of binding, and the creation of twisted lines in the process of untying and untwisting. (Laban, 1966, p. 94)
Dell (1970) defines gathering/scattering as part of “shaping” movement in which the body changes its shape so as to “accommodate to the plastic character of objects” and to “mold space . . . in clay as the sculptor does”. This requires a “constant blending of the muscle group functions in many joints” and emphasizes “either coming toward the body or going away from the body, rather than any particular directions in space” (pp. 55-56). This is distinguished from a general inwards/outwards movement known as “shape flow”, sometimes also called “growing and shrinking” in reference to the “inflation and deflation of the trunk in breathing”, or as “folding or closing” toward the centre and “unfolding” or “opening” away from the centre in reference to the limbs (pp. 45-48). In their anthropological “choreometric coding book” Lomax and Colleagues (1968, p. 269) also include shape flow as a “vague unfolding or folding” or as an “indefinite” shape of a path.
Bartenieff and Lewis (1980, pp. 85-86) use “shape flow” to refer to a path which is “toward or away from the body center”, which “hollows and bulges, shrinks and grows” and which are the “Primary body movement shapes”. They report that during the movement development of children and movement retraining of injured adults that shape flow occurs during a “‘pre–space’ period” when general inwards/outwards paths occur at an earlier stage before clearly defined spatial paths. This growing/ shrinking of “body shaping” with no specific relation to space is distinguished from the gathering/scattering of “spatial shaping” which exhibits a specific form.
Hutchinson-Guest (1983, pp. 175-177) describes “gathering” as “inwardness, of bringing the energy and the line of movement or ‘a volume of space’ to the self” and “scattering” as “concerned with sending the energy or the line of movement away from the self, of pushing ‘a volume of space’ outward and away from one’s center”. These are considered to occur when the arm sequentially curls or uncurls in curved paths accompanied by shoulder rotation, whereas if the ends of the limbs follow straight paths the inward/outward motion is referred to as “taking” and “giving”. This distinction of straight versus curved inward/outward movement is identical to Dell’s (1970) “spoke-like” and “arc-like” movement and is the beginning of a more specified description of the shape of the path.
Hutchinson-Guest (1983, pp. 75-76) discusses the more general concepts of “flexion” and “extension” (not in the strict anatomical sense) which consist of “drawing in toward the center, becoming smaller, folding up, [and] contracting” and “expanding, moving out from the center, becoming larger, [and] growing”. It appears that Hutchinson-Guest's’ notions of “gathering” and “taking” are examples of “flexion” while “scattering” and “giving” are examples of “extension”.
Hutchinson-Guest’s (1983) definitions come to a complication when it is asserted that bending the torso backward could be flexion if it is a “relaxed curve” or extension if it is “elongating” (p. 80). The problem is that movement can “become smaller” either across the front or across the back of the torso. Thus, the “centre” reference point must always be specified for determining whether the movement is inwards or outwards.
Preston-Dunlop (1980, p. 52) refers to “gripping and releasing” as part of the “instrumental use of the body” which can occur towards or away from the centre of the body, or also towards and away from any point in the kinesphere (eg. the centre of the palm, above the head, behind the back, towards the feet, etc.).
Sometimes the generalised inward/outward movement is not classified together with pathways. Preston-Dunlop (1980) categorised gathering/ scattering together with other “actions” such as jumping, turning, falling, traveling, etc. and distinguished these from “abstract shapes” (eg. forms of paths or poses). Winearls (1958, pp. 43-46) gives a similar treatment to “scooping and strewing” which are categorised together with contractions, tilts, falls, swings etc. rather than as part of “form”, or “direction and design”.
Generalised inward/outward motion of kinespheric paths is analogous to a system of elemental phonemes devised by Jakobson and Halle (1956; also described by Gibson, 1969, p. 84) and a system of elemental colours devised by Berlin and Kay (1969) which are both based on the developmental sequence occurring during a child’s learning process or during the development of a culture. Berlin and Kay (1969, pp. 105–110) describe the first distinction as one of “energy” or “amplitude”. In phonology this translates as “loudness”. The first utterance of a child closely resembles the sound “pa” which contains the virtually silent “p” requiring the least amount of energy and the loudest “a” requiring the greatest amount of energy. In colour this first distinction translates as “brightness”. The first colour terms to be developed in primitive cultures consist of a word for the maximum brightness of “white” and the minimum brightness of “black”. The analogous distinction for the kinesphere could be “size” in which the fundamental motions are getting small, and getting large.
IVB.32 Path Hierarchy: Straight, Curved, Twisted, Rounded etc.
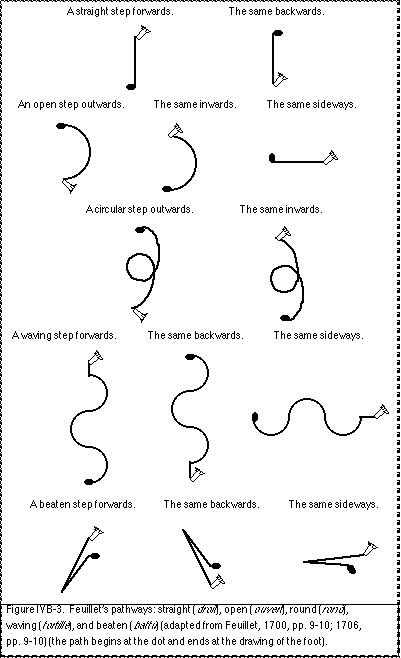
The ballet master Feuillet (1700, pp. 9-10; 1706, pp. 9-10) classified the “almost innumerable . . . Figures the leg makes in moving” into one of five categories; straight, curved, twisted, rounded, or beaten (Fig. IVB-3):
1) In a straight step (“droit”) the foot moves along a straight line and has two variations, straight forward or straight backward.
2) In an open step (“ouvert”) the foot moves along an opening pathway either outwards (curving from the front to back), inwards (curving from the back to front), or to the side (a straight path towards the side, thus an “ouvert droit” step).
3) In a round step (“rond”) the foot moves in a circular path (shaped like a loop in Feuillet’s drawings) either inwards or outwards.
4) In a waving step (“tortille”) the foot follows a wavy, serpentine-like path which alternates between inward and outward curves either forwards, backwards, or to the side.
5) In a beaten step (“battu”) the moving foot is beaten against the other one thus following an angular path either forward, backward, or to the side.
Feuillet’s analysis mixes together paths, poses, and dynamics. The “opening” step refers to the final pose to the side rather than the path, thus two of the opening steps are curved while the other (“ouvert droit”) is straight. The beaten step refers to a dynamic quality while Feuillet’s drawings imply that it is an angular path.
Laban (1926) adopted Feuillet’s five forms into his spatial system (p. 54) and then reduced these five forms to four: “straight”, “simply curved”, “doubly curved (twisted)”, and “round, rolling spiral” (p. 62). Presumably the angular path (battu) is eliminated since it consists of two straight paths.
In a later work Laban (1966, pp. 83–84) begins with these “four fundamental trace-forms” and then further reduces these to just three, the “simple line” (the straight and curved paths categorised together), the “double wave” and the “round”. These three are then further reduced to just one since all paths are “parts or metamorphoses of one basic trace-form, the spiral”, but this statement is never explained. Laban’s inconsistency is further evident in another work where he first lists the “spatial forms of movement” which are “basic” as “round”, “angular”, and “twisted” and later lists the “elementary aspects” of paths as “straight”, “angular”, and “curved” (Laban, 1980, pp. 33, 38).
North (1956, p. 13) subscribes to the view that “all the possible shapes are simply angular, round, or twisted” and other forms are created from a combination of these basic ones. These same categories are reiterated in a later work (North, 1972, p. 19).
In the Jooss-Leeder method of modern dance (which was influenced by choreutics since it was developed by two of Laban’s students), Winearls (1958, pp. 102-105) classifies paths into four categories: straight, half-circle, winding “S”, and full-circle. These four categories retain their roots in Feuillet’s system* but are defined in terms of anatomical function and can be produced by any limb (not just Feuillet’s foot paths). A coordination of simultaneous articulations in two or more joints can cause the distal end of a limb to follow a straight path (droit) which is direct and linear. A bending articulation of a single joint will cause the distal end of the limb to follow a half-circle path (ouvert) which is curved and planar. A rotary articulation followed by a bending articulation will cause the distal end of the limb to follow a winding “S”-shaped path (tortille) which is plastic (ie. does not remain within any single plane). A circumduction of the global joints (hips or shoulders) or of the spine causes the end of the linkage to follow a full circle path (rond) which is circular and planar.
__________
* Winearls’ path-forms are so fundamentally different than Feuillet’s that it is questionable as to why the French terms are maintained. Winearls’ limits the ouvert path to bending articulations (eg. elbow or knee) whereas Feuillet’s ouvert foot path consists of a hip circumduction. The multi-joint articulation of Winearls’ droit has no similarity whatsoever to Feuillet’s droit which articulates only at the hip.
__________
Winearls’ anatomical description is one of the most objective analyses of path forms, however certain problems are evident. A full circle path of the hand does not necessarily require shoulder-joint circumduction (as described by Winearls) but may also be produced by a sequence of shoulder rotation and elbow bending. This sequence of rotate, bend is described as creating plastic S-shaped paths by Winearls but in this case these articulations may create a circular path. The possibility of producing a planar winding S-path (rather than plastic) is also not acknowledged.
Preston-Dunlop (1980, pp. 87-88; 1981, p. 44) and Hutchinson-Guest (1983, p. 167) consider the fundamental categories of paths as either straight or rounded. Preston-Dunlop (1980, pp. 87-88) describes a hierarchical taxonomy in which other categories of path-forms are derived from these two (Fig. IVB-4). “Angular” paths are composed of a series of two straight paths. “Simple curves” (ie. half-circle) are composed of a portion of a rounded path. “Circles” are a complete rounded path cycle. “Spirals” are rounded paths which gradually increase or decrease their diameter. “Repeated curves” are composed of a series of rounded paths. “Twisted” paths are rounded paths which change direction in the middle. “Simple twists” (S–shaped), “repeating twists” (8-shaped) and “twists with spiral” (S-shaped with a spiral at one end) are all variations of twisted paths.
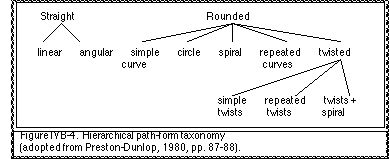
Preston-Dunlop’s analysis demonstrates how a large number of path categories can be organised into a hierarchical taxonomy. However, the underlying joint articulations which create the different paths are left unspecified. For example the unidirectional articulation which can only create a half-circle (eg. the curved path of the hand resulting from elbow articulation) is not distinguished from the changing directions of articulations required to produce a full-circle. This type of anatomical constraint identifies these as two separate types of path (as specified by Winearls, 1958) rather than being derived from the same category.
In Lomax and Colleagues’ (1968, pp. 262-273) “choreometric” coding book for use in anthropological studies of folk dances, they first describe the “shape of the transition”, or the “linking point or hinge joining two phases of a movement” (p. 267) which includes categories of; vague, simple reversal, cyclic, angular, rotation, curved, and loop. In vague transitions the path is unclear and impossible to characterise. In simple reversal transitions the moving body–part returns to its starting point by retracing its path. In cyclic transitions the body-part returns to the starting point through a continuous circular path. In angular transitions the body-part changes its direction by sharply turning a corner. In rotation transitions the body-part changes its direction by using a rotary action. In curved transitions the body-part gradually changes its direction along a curved path. In looped transitions the body–part “links three different dimensions together” (p. 268). These categories need more clarification. For example, it appears that the same shape of path could be produced in both cyclic and curved transitions. The distinction of whether the path remains in the same plane is also vague. A curved transition is described as “a change of direction or plane” but later it is stated that it “must be continued within one plane” or it is called a loop (p. 268). Surely a plastic curve is not sufficient to form a loop, and this also does not allow for planar loops, or would these be considered to be cycles?
Lomax and Colleagues (1968) also describe the “shape of the main activity” or the “ways in which movement develops and defines patterns in space” (p. 268). Five categories are distinguished; “indefinite”, “directional, use of planes-arc”, “use of planes-round”, and “three-dimensional”. Indefinite shapes refer to a vague folding or unfolding of body-parts without a clear emphasis on any direction. Directional shapes are linear paths with a clear direction. Use of planes-arc are fan-like paths created by the motion of an entire limb or limb-segment within a single plane. Use of planes-round are rounded paths created by the successive folding or unfolding of all the segments of a limb within a single plane. Three-dimensional shapes are paths which do not remain in a single plane.
Some of these categories are also unclear. Why must “use of planes-round” require successive use of limb-segments? Into which category would a planar-round path created by circumduction be classified? If the continual changing directions of a circumduction is part of “use of planes-arc” then it is not distinguished from unidirectional arc-like motions. Are plastic loops classified together with plastic S–shaped waves as types of “three-dimensional” paths? The overall difference between the “shape of the transition” versus the “shape of the main activity” is also unclear. How are these distinguished? For example, what is the difference in the form of a path created by a “curve” transition versus a “planar-arc” main activity?
Some of these categories are similar to Moore and Yamamoto’s (1988, p. 194) three general categories of pathway; 1) “straight lines”, 2) “curved and arc–like”, and 3) “complex three-dimensional loops, twists and spirals”. These are essentially linear, planar, and plastic categories (see IVB.13).
Dell (1970, pp. 43-58) distinguishes three kinds of “change in the form of movement”; “shape flow”, “directional”, and “shaping”, which each describe a “kind of bodily adaptation that may create the form” (p. 63). Shape-flow consists of generalised growing/shrinking, opening/closing movements without any clear spatial direction. Directional movement is “the most basic form in which movement establishes a relationship to the surrounding space” (p. 49). “Spoke-like” directional consists of simultaneous articulations in several joints within a limb causing the distal end to follow a straight path. “Arc-like” directional consists (typically) of articulation in a single joint causing the distal end of the linkage to follow a curved planar path. “Shaping” movements consist of the body molding itself in a sculptural-like way which “allows the mover to accommodate to the plastic character of objects in space” and requires the “constant blending of the muscle group functions in many joints” (p. 55).
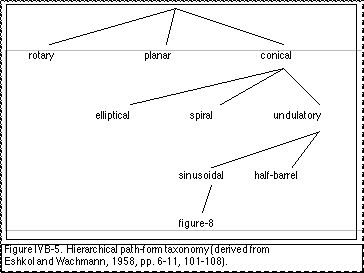
Eshkol and Wachman (1958, pp. 6-11, 101-108) developed a hierarchical taxonomy of path-forms (Fig. IVB-5) based on the elemental anatomic constraint that the motion of the distal end of a body-part will always create a curved path with the articulating joint at the centre. Three types are initially distinguished; 1) “rotary movement” consisting of a body segment rotating around its own longitudinal axis; 2) “plane movement” consisting of a body segment moving within a plane; or 3) ”curved surface movement” consisting of the body segment creating a cone-shaped path, later called “conical” movement (p. 101). Lower-order types of conical movement are categorised as; 3a) “elliptical” movement consisting of a elliptical-shaped path; 3b) “spiral” movement consisting of a series of conical or elliptical paths turning around the same axis while gradually becoming larger or smaller; and 3c) “undulatory” movement consisting of a series of conical or elliptical paths, each turning around a different axis. Two further categories are distinguished within the class of undulatory movements; 3c–1) “sinusoidal” undulatory movements consisting of a series of curves, each turning in the opposite direction (eg. “S”-shaped; a figure-8 is comprised of two sinusoidal movements); and 3c-2) “half-barrel” undulatory movements consisting of a series of curves turning in the same direction (eg. “m”-shaped).
Several similarities can be identified among these various conceptions of kinespheric path categories. A linear path of the distal end of a limb created by multi-joint articulations is well defined and explicitly identified as a straight path (Winearls, 1958), a spoke-like directional (Dell, 1970), a directional shape of the main activity (Lomax et al., 1968), and (implicitly) as composed of simultaneous component curved movements (Eshkol and Wachmann, 1958, p. 117). A planar curved path created by the unidirectional articulation of a single joint is also well defined and explicitly identified as a half-circle (Winearls, 1958), as arc-like directional (Dell, 1970), as use of planes-arc (Lomax et al., 1968), and as plane movement (Eshkol and Wachmann, 1958). A plastic path created by a sequence of articulations in many joints is explicitly identified as a winding S-path (Winearls, 1958), as shaping movement (Dell, 1970), as three-dimensional (Lomax et al., 1968; Moore and Yamamoto, 1988), and as loop transitions (Lomax et al., 1968).
Several discrepancies are also evident. Multi-joint linear paths are not often distinguished from single-joint planar paths (Feuillet, 1700; 1706; Moore and Yamamoto, 1988; Preston-Dunlop, 1980), indeed, Laban (1966, pp. 83-84) appears to group these together as a “simple line”. Another problem is that the unidirectional articulation which carries a limb through a planar curved path (which can never be a full circle) is not explicitly distinguished from a series of directional articulations in one or several joints which carry a body segment through a conical-shaped curved path (which may be a partial or a full circle) (Dell, 1970; Lomax et al., 1968; Moore and Yamamoto, 1988; Preston-Dunlop, 1980). These two have been somewhat distinguished as half-circle versus full-circle (Winearls, 1958) or as plane movement versus conical movement (Eshkol and Wachmann, 1958).
In addition, joint articulation terminology needs to be kept distinct from the shape-of-the-path terminology. For example, when “rotation” transitions (Lomax et al., 1968) and “rotary movement” (Eshkol and Wachmann, 1958) are used to refer to path-shapes, this tends to neglect various other paths which can also be created by rotary articulations (eg. planar-curved, conical).
IVB.33 Choreutic Natural Sequences.
In the choreutic tradition certain sequences of paths have been categorised as “scales” (in the musical sense) or as “natural sequences”:
A series of natural sequences of movement exists which we follow in our various everyday activities. . . . [and] are determined by the anatomical structure of our body. These sequences, or scales, always link the different zones of the body and its limbs in a logical way. (Laban, 1966, p. 37)
Many choreutic scales are devised according to patterns of dynamic equilibrium which create three dimensionally symmetrical pathways (see IIID.50). Laban (1966) also considers that the pathway of movement often has a very particular form and that “the determining factor of this special arrangement is the purpose of the movement”, which is attempted to be accomplished “with the greatest economy of effort” (pp. 43-44). Since “Everywhere economy of effort is in evidence” (p. 45) movements will be chosen which satisfy the goal in the simplest and easiest way. Laban’s concept of economy of effort is identical to an important principal of body mechanics which states: “the individual tends to function in the way that affords the greatest conservation of energy” (Rasch and Burke, 1978, p. 98)
IVB.33a Zones and Super-zones of the Limbs.
Laban considers the range available for a limb’s motion as a type of basic scale for that limb. He outlines the philosophy behind this approach:
Our body is constructed in a manner which enables us to reach certain points of the kinesphere with greater ease than others. An intensive study of the relationship between the architecture of the human body and its pathways in space facilitates the finding of harmonious patterns. . . .
This science of harmonic circles has its origin in the discovery of the laws which rule the architecture of the body. It is obvious that harmonious movement follows the circles which are most appropriate to our bodily construction. (Laban, 1966, p. 25)
These “circles” seem to consist of the roughly circular paths referred to by Laban (1966) as “‘circuits’”, “chains”, or “‘rings’” (p. 21), which mark the maximum spatial range for each of the limbs. The terms “zone” or the “normal zone” of a limb are used for “that part of the kinesphere which can be reached by moving only the limb in question, without much additional movement” (p. 21) and the “’super-zone’” refers to the space which can be reached by the limb combined with torso movements (p. 23). These are similar to the concepts of the “normal work area” and “maximum work area” in studies of ergonomics (Damon et al., 1966, p. 317; Pheasant, 1986, pp. 141-142; See IIB.42) and might be referred to as the “cumulative range of the end member” (Dempster, 1955, p. 570; see IVA.72). A small amount of additional articulations from other joints is allowed within the conception of a limb’s zone, and a large amount of additional articulations is allowed within a limb’s super-zone. Limb’s zones and super-zones contribute to determining the categories of paths which are available to the body.
The normal zone of the leg is identified as an eight-part circuit (Laban, 1966, p. 22) (right-leg):

The normal zone of the arm is identified as a six-part circuit (Laban, 1966, p. 23) (right-arm):

A “zone easily followed” for the torso is identified as a four-part circuit which is “the prototype of a tetragonal or quadrangular circuit” (Laban, 1966, p. 23):

The super-zone for the arm is identified as a six-part circuit (Laban, 1966, p. 24) which is later referred to as a “girdle” (p. 69) or an “equator” (Preston-Dunlop, 1984, p. 41) (right-arm):

A seven-part circuit is also identified as a super-zone for the arm which “gives the basis for a harmonic order of the inclinations” (Laban, 1966, p. 25). This statement is not explained but appears to be related to an even more obscure discussion later:
Plastic models of seven-linked movable chains [Fig. IVB-6] can be constructed which, when turned either by hand or in a mechanical manner, show by their progressive displacement spatial relationships in angles and distances. These correspond exactly to the sequences of the circle of fifths which constitute the backbone of the order of our musical tones. The borders of certain super-zones of the limbs of the body have the same formal rhythm showing identical harmonic relations. (Laban, 1966, pp. 120-121)
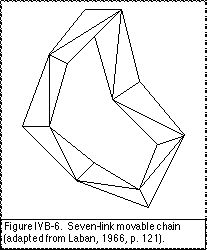
This super-zone for the arm is later referred to as a “peripheral 7–ring” (Preston-Dunlop, 1984, p. 101) (right-arm):

The super-zone for the leg is identified as an eight-part circuit (Laban, 1966, p. 25) (right-leg):

These differently shaped zones and super-zones appear to be at the basis of the development of choreutic natural sequences. Thus, they are the elemental forms of circuit-like paths.
IVB.33b Defense Sequence.
One of the principal “harmonic” paths identified by Laban is based on six movements used when defending oneself when fighting. These are especially identified in the “parrying” movements of sword fencing but Laban also conceives of “fighting” in a broader sense:
It is natural for all living organisms to use the simplest and easiest paths in space when fighting, not only when the fight is a matter of life and death, but also in other activities, since all working is a kind of fighting and struggling with objects and materials. (Laban, 1966, p. 45)
The defence sequence can be represented as a series of dimensional directions (for the right-arm) (Laban, 1966, pp. 37-38):

Laban (1966, p. 39-40) observes that the “defence sequence” actually “deviates” along curved paths either toward the centre or toward the periphery (deviations are in brackets):

Laban (1966) states that these dimensional versions of the defense sequence are “simplified”, and “In reality, the movement follows more complicated paths” (p. 39) (this is related to the deflection hypothesis; see IVA.85). In this case the “defense-scale takes on a slightly altered expression”, “which is a deflected variation of the natural defence-scale” (p. 42) and appears as:

In addition, Laban (1966) describes a “dance-like variation” of the defense sequence which is “transformed into pure diagonals”, has “a more flowing expression” and so is “less useful for practical defense” (p. 42):

Laban (1966, p. 42) continues by suggesting that even “further variations of the defense scale” can be derived which are composed of mixtures of all the variations cited so far.
IVB.33c Attack Sequence.
Laban (1966, pp. 38-41) also refers to a pathway of attacking movements which is the “counterpart” of the defense sequence. These “proceed towards the central area of the adversary’s body” and “the attacker shows a confluence of his movements approximately in front of himself no matter from which area they come”. Later the “attack scale” is specified as a forward/backward and right/left reflection of the defense sequence (p. 80),* this yields the following:

__________
* If the paths of the “defense movements around our body can be fixed in space” and if “we turn half-way round, we find a scale which becomes an attack scale” (Laban, 1966, p. 80). This symmetrical transformation yields a reversal of the forward/back component and the right/left component relative to the body.
__________
This dimensional attack sequence is then conceived to deflect into the first six movements of a “transversal standard scale” which is considered to be the attacking “response- or echo-form” of the defensive transversal standard scale (Laban, 1966, p. 80):

IVB.33d Three-part Knot.
The defense sequence, the attack sequence, and the transversal standard scales are different from each other in that they are oriented in different directions and/or deflected into different inclinations. However these all appear to be variations of the same topological form which might be referred to as a “three-part knot”.
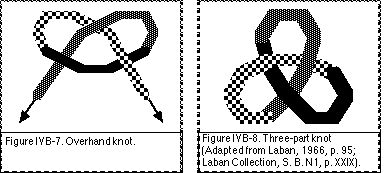
All knots are plastic forms since physical lines cannot remain in the same plane when they overlap. The “overhand knot” (Fig. IVB-7) “is the most common form of tie in existence, being used by almost everyone for many different purposes” (Graumont and Wenstrom, 1948, p. 49). If the ends of an overhand knot are joined then a three-part knot is formed (Fig. IVB-8). This knot was included in an unpublished book by Laban (Laban Collection, S. B. N1, p. XXIX).
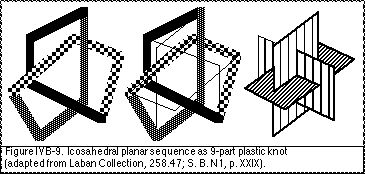
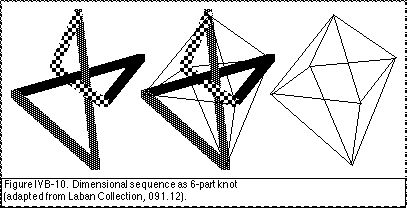
Laban (1966, p. 96) used a three-part knot as a spatial model for the “standard scale of the dynamosphere” (ie. a sequence of dynamics, eg. force, timing) and described its woven “knot-form” shape as “a kind of basket”. Laban and Bodmer aligned this knot-form with the Cartesian planes of an icosahedral network (Laban Collection, 258.47) and refer to it as a “9–part knot” (Laban Collection, S. B. N1, p. XXIX ) (Fig. IVB-9). Laban also illustrated the dimensional sequence with peripheral transitions along each of the Cartesian planes aligned with an octahedral network which can create the knot form (Laban Collection, 091.12) (Fig. IVB-10).
Whenever this knot is discussed it is closely associated with the peripheral 7–ring (see IVB.33a), and usually also with the lemniscate (see IVB.33e) and the 7-part movable chain (Fig. IVB-6). These all appear to be basic to Laban’s choreutic conception and thus attest to the fundamentality of the knot in choreutics. The transversal standard scale (see IVB.33g) also consists of two three-part knots joined together.
The three-part knot is one of the simplest plastic shapes. It uses each of the three dimensions equally and can be divided into three identical parts. In its most symmetrical form each loop of the knot contains a curve relatively parallel to one of the Cartesian planes, followed by a transition to align with a different Cartesian plane. This pattern is repeated three times to complete the knot.
IVB.33e Lemniscate.
The form of a “lemniscate” or “Mobius strip” appears to also play a fundamental role as a path in choreutics but its use is obscure. Laban (1966) states that “They are of a dynamospheric [eg. force, timing] rather than of a kinespheric character” (p. 99) but the same terminology is used in both cases (the lemniscate is also referred to as a “trace-form”) so whether this distinction between space and dynamics was always intended is not clear. Other lemniscates are described as “shadow-kernels of seven-ring sequences” (p. 99), referring to the seven-part super-zone for arm movement (see IVB.33a).
Interviews with Laban’s students (McGivering, 1990) supports the interpretation that the lemniscate was used as a metaphor for the sequence of “inside-outside-inside-outside” etc. rather than as a strict geometric shape of a kinespheric path. Informal experimentation by this author has failed to identify any objective lemniscate-shaped forms which are typically produced by body movement. A typical figure-8 performed by an arm is common and exhibits the kinesthetic inside-outside sensation through the rotary articulations (see Appendix XVI) however, the forearm does not describe a lemniscate in space. Many of Bodmer’s drawings and writings indicate the universal expressive metaphors associated with the lemniscate (Laban Collection, S. B. 38; S. B. 48 “The Lemniscate”), while other writings by Bodmer treat it as an objective kinespheric form (Laban Collection, “Three papers. . .”) Future research might yield more information about the role of the lemniscate within choreutics.*
__________
* For example, the Laban Collection (S. B. N1) contains a large hand-written untranslated German text “copied by S. Bodmer from a book by R. Laban” titled “Harmonie lehre der Bewegung” which appears to discuss the knot-form, lemniscates, 7–rings, and the 7-link movable chain. Unfortunately translation of this text was beyond the scope of this research.
__________
IVB.33f Crawl-like Movement.
Laban (1966, pp. 43-45) identifies a “winding loop” path which occurs during a “‘crawl-like’ movement of both arms” as when “propelling oneself through water”. Each arm performs the path with one arm starting half way through (ie. in canon) (symbols read from left to right):

Laban (1966, pp. 43-44) considers the crawl-like movement and the defense sequence as representing fundamentally contrasting types of kinespheric paths. In the defense sequence “the dimensional directions prevail”, a “firm foothold” is used which is “relatively static”, “movements tend to be centralised” and consists of “a solo effort of one side of the body”. In contrast, the crawl-like movement is “diagonally located”, “fluid and much more mobile”, “essentially peripheral” and consists of a “canon-like . . . duet” between the two arms. This crawl-like path does not appear to be explicitly referred to in any other choreutic literature.
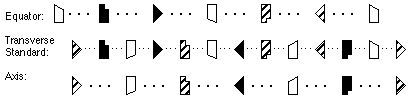
IVB.33g Axis, Equator, and Hybrid.
Laban (1966, pp. 68-72) draws a fundamental distinction between “axial” and “equatorial” movements (p. 70). This is a similar distinction as the one made between the defense and the crawl-like sequence.
Axial paths include pure diagonal lines and a series of six transverse inclinations surrounding a diagonal which are roughly parallel deflections of it (for discussion of “deflections” see IVA.25). This zig-zag form is known as a “cluster” (Laban, 1966, p. 69), an “axis scale” (Ullmann, 1966, p. 179), or a “transverse 6-ring” (Preston-Dunlop, 1984, p. 39). Quadrangle-shaped paths are also identified, known as “mixed two rings” (Preston-Dunlop, 1984, p. 35), or “four-rings” (Laban, 1926, p. 36), which are described as having a relationship to the axial paths of a “connecting nature” since these are “bound together” (Laban, 1966, pp. 75-77).
Equatorial paths include six-part peripheral rings (one of the super-zones of the arm, see IVB.33a) known as a “girdle” (Laban, 1966, p. 69), an “equator scale” (Ullmann, 1966, p. 177), or a “peripheral 6-ring” (Preston-Dunlop, 1984, p. 41) and three-part peripheral rings around each end of the diagonal known as a “polar triangle” (Laban, 1966, p. 70) or a “peripheral 3-ring” (Ullmann, 1966, p. 181). These have the geometric forms of a great circle and a small circle respectively (Rich, 1963, p. 206). Other types of triangular-shaped equatorial paths are identified, some known as “transverse 3-rings” (Preston-Dunlop, 1984, p. 37) , and others known as “cubic 3-rings” (Preston-Dunlop, 1984, p 31), which are described as having a relationship to the equatorial paths of a “separating nature” since they are roughly parallel (Laban, 1966, p. 76).
Laban (1966) contrasts the back-and-forth movements of axial paths which are “unconscious” “involuntary” and “automatic” with the orbital movements of equatorial paths which are “wakeful”, “inspired” and “emphatic”. A “hybrid offspring” is then identified as a “third mode of movement” which consists of “intermediary links” between the automatic and the emphatic. This third mode is used in “everyday working movements and general locomotion” and is considered to be “the prototype of all ordinary movement chains” in that it “can be shown to contain a series of shapes which are the basic elements of almost all trace-forms employed in movements”. Thus, it is known as the “‘standard’ scale” or the “‘primary’ scale” (pp. 70-72). Choreutic standard scales are considered to be the model of kinespheric “harmony” and to represent “the criterion by which harmonic relations can be evaluated” (p. 82). One of the axis scales, its orbiting equator, and their intermediary hybrid standard scale is notated as follows (symbols read from left to right):
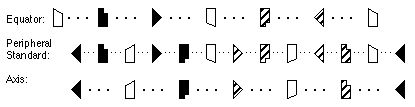
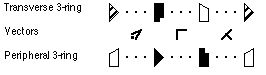
Another path is identified consisting of twelve transversals which is an “inner [ie. transverse] counterpoint of the surface [ie. peripheral] standard scale” and so is known as the “‘transversal standard’ scale” (Laban, 1966, p. 78), as the “A-scale” or “B–scale” (Ullmann, 1966, p. 157) or as a “transverse 12-ring” (Preston-Dunlop, 1984, p. 66). The transversal standard scale also has an intermediary hybrid relationship to the axis and the equator (symbols read from left to right):
The relationships between these choreutic forms can often be observed in the deviations which occur when they are bodily performed. For example, If a transverse path is bulged outward in its middle it will become a peripheral path. This deviation can result in a transverse 3-ring transforming into an equator and a (transverse) axis scale transforming into a (peripheral) standard scale (Salter, 1977, p. 137). Ullmann (1966, pp. 175-181) describes this type of deviation as the “circumvention of transversals”.
Another transformation occurs between the equatorial transverse 3–rings and peripheral 3-rings. It can often be observed that when performing the great circle of a transverse 3-ring (eg. with the arm) that the small circle of a parallel peripheral 3-ring also spontaneously occurs with another part of the body (eg. the head) (personal observation). Indeed, these can be conceived as being the same identical path (ie. same slope of inclination), the one simply being performed larger than the other. Similarly, Ullmann (1966, p. 182) refers to the peripheral 3-rings as “reflections” of the transverse 3-rings. These both have the identical series of lines of motion and so can be notated with an identical series of “vector symbols” (see IVA.25c), for example (symbols read from left to right):
IVB.34 Kinespheric Paths as Topological.
In his famous studies of motor control, Bernstein (1984, pp.102–110) makes a distinction between the general configurations of topology and the specific sizes of metrics. Topological geometry considers the overall shape of a figure regardless of its specific size or metric distortions, this includes attributes of whether a figure is closed or open, if the lines intersect or not, which features are next to each other, or if one figure completely surrounds or encloses another figure. Bernstein further designates “topological properties of the first order” (p. 103) which includes the number of features (eg. angles, crossing lines) which are present in a figure.
Bernstein (1984) points out that each letter of the alphabet is in a separate first order topological class and that letters can be visually recognised regardless of metric variations (eg. relative length of line-segments, degree of curvature or straightness, embellishments and flourishes, and much of what could be called “style” in handwriting) (p. 104). Apparently visual recognition processes require only that the first order topological form which is unique to each letter be distinguished. Bernstein also proposes that “movements of live organisms, to no less a degree than their [visual] perceptions, are determined by topological categories” (p. 105). For example, it is not likely that a geometric form can be drawn to the exact same metric properties twice without the aid of a compass and ruler. Every new motor execution of a spatial form will have slightly different measurements, sometimes larger or smaller, more angular or more curved, more upright or more inclined (pp. 105–108). This metric variability always occurs involuntarily or it can be intentionally produced. The metric attributes of kinespheric form can be easily transformed as is shown in many varieties of motor symmetry transformations (eg. by changing size, changing the body use, rotating or moving the form, stretching or compressing its degree of curvature; see IIID). However, topological attributes can be easily reproduced at will, and recognised regardless of the metric variability. The essence of the form, which gives it its identity, is the particular collection of topological characteristics; “the general appearance - on a certain je ne sais quoi - that indubitably appears to be a topological category” (p. 105). Bernstein concludes that “the human motor system cannot attain any high degree of metric proficiency, but it can be said that our motor system is very sensitive to topological distinctions” (p. 105), and so “an obvious preference of the motor field [is] for topological categories as compared with metric ones” (p. 108).
The structure of the kinespheric network (see IIIC.30; IVA.80-.90) will vary according to the changing metric quantities (degree of curvature, angle of direction). Bernstein (1984) characterises the variable metric structure of the kinespheric net as the “co-ordinational net of the motor field [which] must be regarded, in distinction to a net in Euclidian geometry, firstly as non-rectilinear, and secondly as oscillating like a cobweb in the wind” (p. 109). These oscillations are the stretching and bending of the kinespheric net as the metric quantities of movement vary on each successive execution (depending on the conditions at the particular moment) while the overall essential topological pattern of the structure remains unchanged.
The choreutic system of kinespheric forms appears to be structured in this same way. For example, as discussed in regards to the “defence sequence” (IVB.33b) a single topological form can be bodily executed relative to the dimensional directions (octahedral net), diametral directions (icosahedral net), the diagonal directions (cubic net) or combinations and further variations of these. The choreutic concept of a “deflection” (see IVA.80) is related to Bernstein’s concept of the “oscillation” of the motor field. Bodmer considers choreutic forms in this same way:
I would like to stress at the beginning: That the same topological forms or links of spatial relationships can be traced through all the different crystalline structures. Regular and irregular [polyhedral] forms or structures can be formed in all equally. (Bodmer; in Laban Collection, S. B.48 “Space orientation and Harmony”)
Bernstein (1984) supposes that the language of the kinesthetic perceptual-motor system is based on topological information. Kinesthetic-motor knowledge may be mentally represented as a “higher directional engram . . . which may be called the engram of a given topological class . . . [and] is extremely geometrical, representing a vary abstract motor image of space” (p. 109).
These types of topological classes can be deciphered within choreutic kinespheric forms. As reviewed above (IVA.85; IVB.33b) the topological shape of the defense sequence occurs as the “dimensional scale”, the “diagonal scale” and the “‘A’ and ‘B’ scales”. Also, for example, the topological shape of a “6-ring” occurs towards dimensional directions, diagonal directions, diametral directions, and may be either extended out to the periphery or contracted in through the interior (transverse) (Preston-Dunlop, 1984). The ability to distinguish the fine metric variations between the slightly different orientations of different movements only comes with increased practice and Laban (1966, p. 101) states that for “general observation” that the fine metric variations are “not vitally important”.
In this way the choreutic kinespheric “scales” provide the performer with an organised cognitive structure (ie. topological forms mapped out on various conceptual kinespheric nets) which can be used to guide oneself through different kinespheric topological classes, each performed with a variety of metric variations. Each topological pattern (ie. a sequence such as a “6-ring”) and each metric variation (eg. more dimensional or more inclinational), gives the mover kinesthetic spatial (and so neural-muscular-skeletal) experiences of systematically exploring the variety of possible kinespheric forms.
The fundamental role of topology has also been identified in other spatial cognition studies. The famous child psychologists Piaget and Inhelder (1967) used a variety of spatial tasks (eg. feeling an unseen shape and then recognising it visually; drawing the shape of a human body or of geometric figures; constructing shapes with match sticks; placing beads on a rod in a certain order; recognising or tying knots) which revealed that childrens’ spatial knowledge begins at a stage where topological relationships are recognised, and gradually develops to a stage where Euclidean geometrical relations are comprehended. Sauvy and Sauvy (1974) report on similar experiments with children which produced similar results of topological characteristics being learned first.
Research into cognitive maps of larger scale environments (see IIIC.10) has also revealed that when learning a space through actual experience (eg. walking around a town centre or through the rooms in a building) that topological relations are learned first (eg. what-is-next-to-what along a particular route), and only after long-term learning are the true Euclidean directions and distances accurately learned (Moar, 1978). Indeed, map-like spatial representations are typically based on the “topological connectedness” of the order of loci and turns, however the exact distances traveled and angle of turns are not well known and so are approximated close to a prototypical value (eg. 45° or 90° angles) (Byrne, 1979, p. 153; see IVA.53).
IVB.35 Method for Deriving a Taxonomy of Kinespheric Paths.
A method is developed here for deriving a taxonomy of kinespheric pathways based on categories developed in choreutics and dance, anatomical constraints identified in kinesiology, and models of motor control. The initial taxonomy considers only pathways of limb-motions created by concentric (shortening) muscular contractions.
The taxonomy is based on the fundamental motion of the skeletal system which is angular movement. This is developed into more complex movements according to the three factors of; 1) single-joint versus multi-joint articulations; 2) single-phase versus multi-phase action; and 3) discrete versus gradual transitions between phases. These taxonomic attributes are briefly presented here, and an initial taxonomy is presented in Appendix XVI.
IVB.35a Skeletal system produces angular motion.
Skeletal articulations at a single-joint always produce angular motion, that is, a curved line of the distal end of the body segment with the articulating joint at the centre of the curve. Angular articulations (eg. bending the elbow) are typically distinguished from rotary articulations (eg. the humerus rotates around its own longitudinal axis) but these both produce angular motion of any point that is not exactly on the rotational axis. The angular motion resulting from a rotatory articulation can be very large as in the case of forearm/hand motion produced by shoulder rotation when the elbow is flexed. Therefore these both are considered to be essentially the same type of angular motion.
IVB.35b Single-joint versus multi-joint articulations.
The pathway of the distal end of a limb (eg. the hand) can be created by articulations in a single joint (eg. the shoulder), or in multiple joints (eg. vertebral joints, sternal clavicular joint, shoulder, elbow, wrist). Complexity increases as the number of articulating joints increases. These can generally be distinguished as single-joint versus multi-joint articulations.
IVB.35c Single-phase versus Multi-phase Action.
The notion of a phase of muscular action can be used to refer to a single action of a particular muscle group as it moves the body in a single direction. Muscles are attached to tendons which attach to bones. When a muscle contracts it pulls the points of bony attachment closer together along the shortest possible route which can be referred to as the muscles’ “line of pull” or the “line of application of the force” (Rasch and Burke, 1978, pp. 34, 117; Wells and Luttgens, 1976, pp. 37-38, 77).
The amount of muscular shortening and skeletal motion are limited by several factors including: the muscle’s shortest possible state; the longest possible state of the antagonist muscles and ligaments around the articulating joint; bony stops (eg. elbow or knee extension), and the bulk of muscle and fat tissue (eg. elbow or knee flexion). Once a limit of motion has been reached the only way for motion to continue is for a different muscle group to contract, thus changing the direction of the line of pull.
The mass-spring model of motor control posits that the elemental unit of body–movement consists of a single motion toward a new “equilibrium point” where there is equal tension between agonist and antagonist muscles (Bizzi and Mussa-Ivaldi, 1989; Jordan and Rosenbaum, 1989; see IIIB.20). In related studies of “trajectory formation” (ie. how the motor system produces complex pathways) measurements of the degree of path curvature and the velocity along the path both revealed that a path was divided into several “path segments” separated by “curvature peaks” (Abend et al., 1982; Morasso, 1983b; see IIIB.30). A model for the production of complex paths was developed in which the path segments are referred to as “strokes” which are “abstract representations” of kinespheric information (Morasso et al., 1983, p. 97) and so appear to be the “primitive movements in the motor repertoire” (Morasso, 1986, p. 44). Laban (1966, pp. 27-28) also identified these same attributes and referred to them as “‘peaks’ within the trace-form” and “phases of its pathway” (see IIIB.40).
The notion of a “phase” of action is used here as the muscular counterpart to a spatial “stroke” which indicates that one muscle group is shortening (also implying that the antagonists are lengthening). When a new muscle group begins to shorten this can be referred to as a new phase and will produce a new stroke. Since each muscle group has a different line of pull, each phase will produce a stroke moving in a different direction (even if only slightly).
This notion of “phases” of an action has also been used in kinesiology (Rasch and Burke, 1978, p. 50; Wells and Luttigens, 1976, p. 45), motor control studies (Tuller et al., 1982, pp. 259-260), and in choreutics (Bartenieff and Lewis, 1980, pp. 73-78; Laban, 1966, pp. 27-28) to refer to the different component sub-movements or individual contractions of muscle groups within a larger movement phrase. The term “phasing” is also used to refer to the relative timing among the components within a movement sequence (Shapiro and Schmidt, 1982, p. 136; Wing, 1980).
A single phase is a contraction of a muscle group which moves the skeleton along a single line of pull and exhibits a single spatial stroke. According to the mass-spring model of motor control, agonist/antagonist equilibrium positions serve as guiding points. Assuming the movement continues, at each guiding point a curvature peak will be exhibited during the transition from one phase to the next. The next phase necessarily consists of a different muscle-group (even if only slightly) which moves the skeleton along a new line of pull.
IVB.35d Phase transitions: discrete (angular) versus gradual (curved).
A traditional view in dance and choreutics draws an initial distinction between straight versus curved paths, and then posits that angles are composed of a series of straight paths while rounds, loops, figure-8s, etc. are composed of a series of curved paths (Preston-Dunlop, 1980, pp. 87-88; 1981, p. 44; Hutchinson-Guest, 1983, p. 167). This view is not adopted here for two principal reasons. Curved paths are the fundamental motion produced by skeletal articulations. Straight paths are comprised of two or more simultaneous component curved paths and so must be considered to be kinesiologically more complex. Also, straight paths are not necessary to produce angles since an angle may occur at an abrupt transition between two curved paths.
Instead, the conception of “trajectory formation” developed by Morasso and Colleagues (Morasso, 1986; Morasso et al., 1983) will be followed here. This model posits that the motor system executes a spatial trajectory by producing a series of “path segments” or “strokes”. Angular transitions between strokes occur when they are performed in a discontinuous manner, whereas a partial time overlap between consecutive strokes causes one stroke to be blended into the next creating a smoothly curving transition. That is, one stroke begins before the previous stroke has ended and so the two strokes are momentarily superimposed. This model of “trajectory formation” is identified as being similar to “spline functions” which generate curved lines from a series of straight vectors in computer graphics (Morasso, 1986, pp. 38-42) such that “the desired shape is approximated by means of a polygon” and then “the sides of the polygon are generated and superimposed” (Morasso et al., 1983, p. 86). The amount which two consecutive polygon edges are overlapped (ie. “superimposed”) determines the degree of curvature between successive strokes.
According to this model an “S”-shaped and a “Z”-shaped wave are classified into the same category, the only difference being the type of transition between strokes. This conception appears to have been implicitly followed by Laban (1966) when he classified a “2”-shaped path (which includes an angle) as being an “S”-shaped wave (pp. 83-84). Laban also asserted that “to perform angular sections, we must give each section a special accentuation” (p. 46), and thus a “cone-shaped trace-form” can be “executed smoothly in a continuously curving pattern” or the “same trace-form” can be “executed in a broken or angular way, with almost imperceptible pauses between each section” (p. 47). Similarly, Laban (1963, pp. 93-94) describes that “movements . . . can be performed either fluently or angularly. In fluent performance more stress will normally be laid on the paths, and in angular performance on the points”.
The fluent, overlapping, transitions creating curves between strokes can be referred to as “gradual” phase transitions. The broken, abrupt transitions creating angles between strokes can be referred to as “discrete” phase transitions.
These four taxonomic attributes: 1) The fundamental curved movement; 2) Single-joint versus multi-joint articulations; 3) Single-phase versus multi phase actions, and; 4) Discrete or gradual phase transitions; can be used to develop a taxonomy of kinespheric paths. An initial exploratory taxonomy has been developed and is presented in Appendix XVI. Further refinements to this type of taxonomy based on characteristics of anatomy and motor control can lead to a kinesiologically valid categorisation scheme. This is a matter for future research.