In Section III. psychological validity was provided for the choreutic conception of kinesthetic space since its cognitive structures for the mental representation of kinesthetic spatial knowledge have also been well developed in spatial cognition and motor control research. These include how spatial information is defined relative to a reference system; kinesthetic spatial knowledge is based on a mental code of elemental locations; higher-order networks of locations are collected into map-like images; and many symmetrical operations can be performed. Close similarities were especially identified between choreutic polyhedral-shaped cognitive maps of the reachspace and the “trajectory formation” model of motor control.
Section IV. reevaluates two components of choreutics more closely. In Section IVA a prototype/deflection hypothesis is identified in choreutics which posits that space is conceived according to dimensional and diagonal prototypes while actual body movement occurs along “deflected” directions. Similar spatial prototypes are identified in visual spatial cognition and the conceptual structure of ballet. A kinesiological analysis supports the bodily tendency towards deflections, and this concurs with ergonomic measurements of the shape of the kinesphere. Various choreutic deflections are reviewed and it is seen as a diagonally-conceived technique as opposed to the dimensionally-conceived technique of ballet. An experiment then attempts to identify prototypical reference points in kinesthetic spatial cognition.
In Section IVB. various categories of kinespheric form are identified which can contribute to the need of defining classes of kinesthetic spatial information in psychology and dance studies. These are reevaluated according to perceptual processes and kinesiology. The primitive element of body poses is the straight body segment with individual segments conceptually organised into higher-order groupings. The primitive element of body paths is the curved stroke between positions of agonist/antagonist equilibrium. Curved strokes can be joined into higher-order sequences according to anatomical constraints. Choreutic topological forms deflected across various kinespheric nets are analogous to Bernstein’s (1984, p. 109) conception of the “net of the motor field . . . as oscillating like a cobweb in the wind”. An experiment demonstrates that kinesthetic spatial information is organised into cognitive categories and that choreutic material and Labanotation symbols can be advantageously used in experimental research.
A hypothesis can be identified in choreutics which posits that dimensional and diagonal orientations serve as conceptual prototypes of pure directional stability and pure directional mobility respectively, while actual body movements occur as “deflections” between the idealistic pure dimensions and pure diagonals, that is, mixtures of stability and mobility. Considerable support for this prototype/deflection hypothesis can be found within kinesiological and spatial cognition studies.
In order to evaluate the prototype/deflection hypothesis, the choreutic system of kinespheric directions needs reviewing. Before “directions” are reviewed, some preliminary distinctions should first be made. “Direction” will be taken as referring to the orientation of a directional line. When the directional line passes through centre then a point on the line may be considered a directional point. All lines in the same orientation are considered to be in the same direction.
IVA.11 Directional Lines versus Directional Points.
“Direction” can be defined as a line; “the course or line along which a person or thing moves, points, or lies” or also as a point; “the place towards which a person or thing is directed” (Collins, 1986). For example, if a person is asked which “direction” they are going, they might reply in terms of their final destination (eg. to the store, to the kitchen), or they might reply in terms of their line of progression (eg. down main street, westward). The “directions” north and south consist of a heading towards a directional point while the directions west and east consist of a heading along any one of many parallel directional lines.
IVA.12 Limb Orientation versus Line of Motion.
This distinction between a directional line versus a directional point has been an underlying factor throughout the development of choreutics and Labanotation. Limb movements can be notated according to the limb position (directional point) or according to the line of motion from one position to the next (directional line). Gertrud Snell-Friedburg (1979) recalls that while working with Laban during the development of Labanotation in the 1920s “a question occurred again and again -- should the [notation] signs . . . show the movement in the direction [the line of motion] or the final goal, the position achieved” (p. 12 [italics hers]). Preston-Dunlop and Lahusen (1990) also discuss the problem which Laban “tried to solve was how to write [lines of] motion, not only positions passed through, a task which proved to be extraordinarily difficult” (p. 25).
Some of Laban’s (1926) early notations represented lines of limb-motion rather than positions moved to (see IVA.14). This idea carried through into early introductions of modern Labanotation where the “direction symbols” (see IVA.13) are said to be “motion characters” which indicate the “directions of movement” and “complex movement actions” (Laban, 1975b, pp. 29-30; also Preston-Dunlop, 1969, p. 26), or that “progression is expressed by the direction signs” (Knust, 1979a, p. 1). In other places it was made explicit that, in reference to limb movements, the direction symbols indicate the limb’s position, that is, the orientation of a directional line from the limb’s proximal to distal ends. Limb positions are represented as “directional-points” (Laban, 1966, p. 21) and limb “movement is the transition from one point to the next”, or one “directional destination” to the next (Hutchinson, 1970, pp. 15, 29; also Hutchinson-Guest, 1983, p. 61).
The “direction” of a limb’s orientation should be distinguished from the “direction” of the limb’s motion. The arm may begin in one direction (its initial orientation) and then move into a different direction (its new orientation). A “line of motion” is used here to refer to the curved or straight path of the limb’s centre of gravity (or any anatomical point) as it moves from one limb orientation to the next. One “direction” refers to the limb orientation. The other “direction” refers to the line of motion of the limb’s centre of gravity from one position to the next.
IVA.13 Labanotation Direction Symbols.
A set of “direction symbols” has been developed in Labanotation and choreutics (Hutchinson, 1970, p. 24; Laban, 1966, p. 12) which can be used to indicate limb-motion or self-motion. In reference to limb motion, a direction symbol indicates the orientation of the line between the proximal and distal points of a particular skeletal linkage (regardless of the degree of joint angles within the linkage) (Hutchinson, 1970, pp. 164-170; Preston-Dunlop, 1969, p. 60). That is, “the direction signs indicate the direction towards which the limbs must incline” (Knust, 1979a, p. 14 [italics his]).
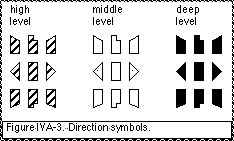
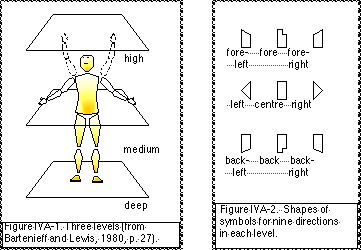
The orthography of the Labanotation direction symbols is based on three levels (high, medium, deep) (Fig. IVA-1) and nine points at each level (fore, fore–right, right, right-back, back, left-back, left, left-fore, and centre). Each symbol for the nine points at each level has its own particular shape (Fig. IVA-2). The level is indicated by whether the symbol is striped (high level), has a dot (medium level), or is blackened in (deep level); this yields a total of 27 direction symbols* (Fig. IVA-3). Further details about the meaning of the direction symbols are given below (IVA.20).
__________
* It could be said that there are 33 direction symbols since the symbols for fore and back are also written as right/left reflections (Hutchinson, 1970, pp, 24-26). This variation in the fore/back direction symbols indicates whether the right or left body-side is executing the movement but the indication of direction is identical. For rough motifs this distinction between the two forward symbols or the two backward symbols is not critical.
__________
What is implicit in the indication of limb motions and positions with a direction symbol is its relationship with the centre (  ). The “direction” of a limb position represented by each symbol is the orientation of a directional line which passes through centre. For example, a directional point (eg.
). The “direction” of a limb position represented by each symbol is the orientation of a directional line which passes through centre. For example, a directional point (eg.  ) really refers to the directional line between two locations (
) really refers to the directional line between two locations (  ).
).
In regards to limb positions and movements, a direction symbol specifies a limb’s orientation. The limb’s line of motion is specified by using two direction symbols, that is, “the transition from one point to the next” (Hutchinson, 1970, p. 29). Other notation systems developed in dance (Eshkol and Wachmann, 1958, p. 53) and in motor control (Bernstein, 1984, p. 117) have also represented limb positions as an orientation of a distal to a proximal joint, with limb motions (pathway) implied as transitions from one position to the next. Laban (1966) makes use of three dots following a direction symbol to indicate “the continuity of the movement” (p. 22). Thus (in reference to limb positions) the direction symbols represent locations of a limb’s distal end relative to “centre” and the dots represent the line of motion (of the centre of gravity or an anatomical point) between two locations (Fig. IVA-4).

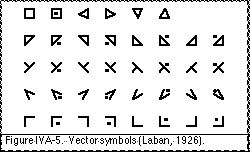
IVA.14 Vector Symbols from “Choreographie” (Laban, 1926).
Another group of symbols used during the early development of Labanotation and published in Choreographie (Laban, 1926, pp. 20-21, 35, 44-45, 47, 50-53, 72) appear to be used to specify the direction of a limb’s line of motion regardless of the limb’s orientation (Fig. IVA-5). These are referred to here as “vector-symbols” since they specify the direction of motion but not any particular locations. An analysis supporting this vector-like interpretation of Laban’s (1926) notations is provided in Appendix IX and translations of the vector symbols into Labanotation direction symbols are presented below (IVA.20).
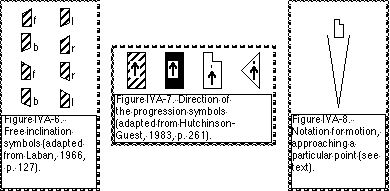
Other vector-like notations were also developed. Laban (1966, pp. 125-130) outlines “free-inclination symbols” or “free space lines” consisting of a direction-symbol together with a small letter to indicate the “deflection” (Fig. IVA-6) (for discussion of “deflection” see IVA.24). The notion of “free” refers to how the symbols can be used to specify the direction of a limb’s line of motion regardless of the positions and locations of the body-parts (ie. locus-free). Laban mentions that this type of notation is “an old dream in this field of [choreutic] research” but which is left for the “future development of kinetography” (p. 125) This suggests the early work developing the vector-symbols (Laban, 1926) which were later abandoned in favor of the (conceptually simpler) locus-based direction symbols.
Hutchinson-Guest (1983, p. 261) developed an analogous notation referred to as “direction of the progression” used to notate the “path of a gesture”. This notation consists of an arrow contained within a direction symbol (Fig. IVA-7). None of these vector-type notations have received any noticeable usage which may attest to the greater difficulty of conceptualising the orientation of a limb’s line of motion versus its orientation. Similar notations such as the “motion toward” or “motion away” symbols (Hutchinson-Guest, 1983, p. xxiv; Preston-Dunlop, 1969, p. 54) (Fig. IVA–8) indicate motion but this is motion towards a particular point and does not specify the orientation of the line of motion.
IVA.15 Equality of Parallel Directions.
When two lines are parallel they are considered to be in the same “direction”, that is, all parallel lines will have the same measure of their inclination, or “slope” (Munem and Foulis, 1986, p. 139). For example, all lines pointing westward will be parallel and will be considered to be oriented in the same direction.
This equality of parallel directions is utilised in choreutics. For example, Ullmann (1966) describes how “Dimensional, diagonal and deflected directions have the same directional value in both central and [parallel] non-central movements” (p. 147) and that when peripheral lines are parallel to transverse lines “they do not constitute new directional inclinations, but are the same as those of the transversals only transposed further away from the centre of the kinesphere” (p. 172).